Hyundai Tucson: Engine Mechanical System - Removal
Hyundai Tucson - Fourth generation (NX4) - (2020-2023) - Workshop Manual / Engine Electrical System / Starting System / Engine Mechanical System - Removal
Removal
- Turn the ignition switch OFF and disconnect the battery (-) terminal.
- Remove the air cleaner assembly.
(Refer to Engine Mechanical System - "Air Cleaner")
- Remove the engine room under cover.
(Refer to Engine Mechanical System - "Engine Room Under Cover")
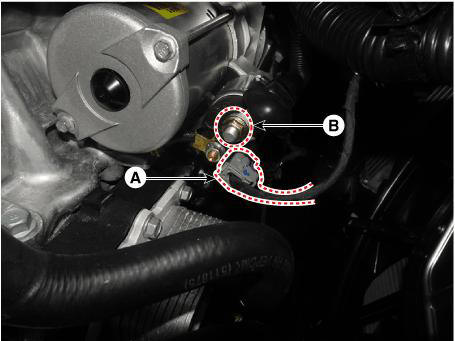
- Disconnect the starter ST connector (A).
- Remove the stater "B" terminal cable mounting nut (B).
Tightening torque : 9.8 - 11.8 N.m (1.0 - 1.2 kgf.m, 7.2 - 8.7 Ib-ft)
- Remove the starter mounting bolt (A).
Tightening torque : 49.0 - 63.7 N.m (5.0 - 6.5 kgf.m, 36.2 - 47.0 Ib-ft)
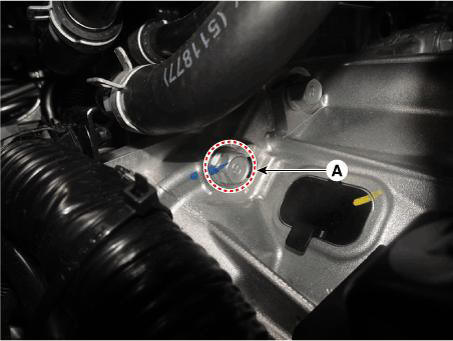

- Remove the starter (A).

READ NEXT:
 Engine Mechanical System - Installation
Engine Mechanical System - Installation
Installation
Install in the reverse order of removal.
Disassembly
Remove the M-terminal nut (A) on the magnetic switch assembly (B).
After loosening the screws (A), remove the magnetic switch assembly.
Remove the throug
Free Running Inspection
Place the starter motor in a vise equipped with soft jaws and connect a
fully-charged 12-volt battery to
starter motor as follows.
Connect a test ammeter (150-ampere scale) and carbon pile rheostats
shown is the illustration.
Connect a
Starter Brush Holder Test
Check that there is no continuity between the (+) brush holder (A) and
(-) plate (B). If there is continuity,
replace the brush holder assembly.
Inspect Overrunning Clutch
Slide the overrunning clutch along the shaft.
Replace i
SEE MORE:
ETC (Electronic Throttle control) System
Description
The Electronic Throttle Control (ETC) System consists of a throttle body with
an integrated control motor and throttle
position sensor (TPS). Instead of the traditional throttle cable, an Accelerator
Position Sensor (APS) is used to
Important safety precautions
This chapter provides you with important information about how to protect
yourself and your
passengers. It explains how to properly use your seats and seat belts, and how
your air bags work.
Additionally, this chapter explains how to properly
Information
- Home
- Hyundai Tucson - Fourth generation (NX4) - (2020-2023) - Owner's Manual
- Hyundai Tucson - Fourth generation (NX4) - (2020-2023) - Workshop Manual
